

چگونه پرینتر سه بعدی دلتا بسازیم؟
پرینتر سه بعدی مبتنی بر روبات کارتزین از پیکره ای چسبیده به زمین بهره می گیرند. این ویژگی در حرکت به سمت کاربری های جدید و فضای کاری بزرگتر یک محدودیت جدی تلقی می شود.
شرح اجزاء و قسمت های اصلی پرینتر سه بعدی
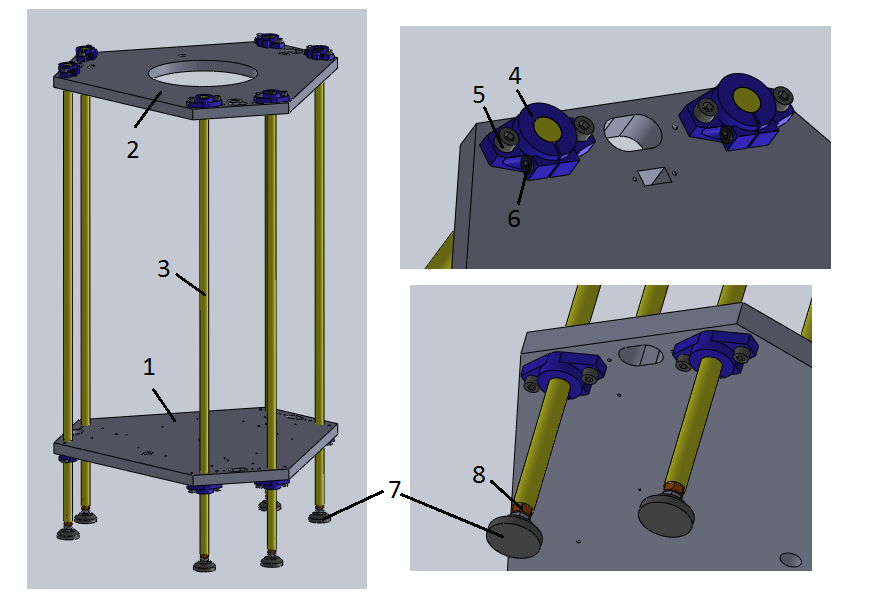
پرینتر سه بعدی دلتا از یک شاسی صلب و مستحکم بهره می گیرد که اجزاء دیگر پرینتر سه بعدی بر روی آن سوار می شوند. شاسی از ود صفحه پلکسی گلاس با ضخامت 15 میلی متری (1) و (2) به عنوان صفحات زیرین و بالایی پرینتر سه بعدی تشکیل می شوند که با روش برش لیزر برش خورده و توسط شش میله با قطر 12 میلی متر (3) به هم متصل می شوند. سوراخ قرار گیری میل راهنما ها بر روی صفحات بالا و پایین بدقت توسط ماشین فرز سوراخکاری می گردد تا دقت پرینتر سه بعدی به عنوان یک پرینتر صنعتی تامین شود. اتصال مابین هر میله راهنما و صفحات توسط حامل های شفت (4) و توسط دو عدد پیچ M5*20 ( جهت محکم کردن حامل شفت به صفحات) (5) و یک عدد پیچ M4*15 ( جهت محکم بغل کردن میله راهنما بوسیله حامل شفت) (6) برقرار می گردد. در زیر صفحه زیرین فضایی به اتفاع 100 میلی متر برای تعبیه موتورهای پله ای پرینتر سه بعدی، مدار کنترل، منبع تغذیه و... اختصاص داده می شود. در انتهای پایینی هر میله راهنما یک سوراخ رزوه شده M6 تعبیه شده است تا تراز بودن پرینتر سه بعدی توسط پایه های لاستیکی (7) تنظیم شده و سپس توسط مهره های M6 (8) تثبیت گردد.
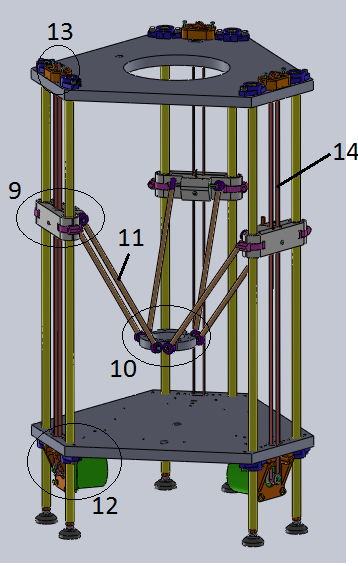
اجزای اصلی واحد مکانیکی روبات دلتای طراحی شده برای ساخت پرینتر سه بعدی مورد نظر در شکل زیر آمده است. روبات دلتا از منظر حرکتی از اصل بر مکانیزیم های موازی ( Parallel Mechanism) تیعیت می کند. بدین شرح که برای اینکه مجری نهایی روبات (10) بخواهد در یکی از سه جهت اضلی X، Y و Z حرکت نماید هر سه بازوی متصل به آن- هر بازو از دو میله رابط دارای مفصل کروی در دو سر خود (11) تشکیل می شود- باید به صورت حساب شده حرکت نمایند. حرکت بازوها با بالا و پایین شدن محاسبه شده هر یک از سه گاری (9) روبات کنترل می شود. که حرکت خود گاری های سه گانه روبات توسط سه عدد استپر موتور (12) که در فضای زیرین صفحه پایینی قرار گرفته اند از طریق پولی دندانه دار سوار شده بر محور موتورها و بواسطه تسمه های دندانه دار (14) متصل به گاری ها به آنها منتقل می گردد. تسمه های دندانه دار به نوبه خود از روی جفت بلبرینگ نصب شده بر روی صفحه فوقانی (13) دور خورده و سر دیگر آن به گاری متصل می گردد.
خود گاری ربات (9) از اجزای روبرو تشکیل شده می شود: قطعات بدنه گاری(15)، دو عدد بلبرینگ خطی (16)، دو عدد بست فلزی شیلنگ (17)، یک عدد اسپیسر فلزیبا طول 60 میلی متر (18)، قطعه شاتر سنسور نوری (19) (که بعدا توضیح داده خواهد شد)، پیچ و مهره M3 (20) برای اتصال قطعات بدنه گاری از نقطعه وسط به هم. در قسمت (21) بدنه گاری یک شیار طولی تعبیه شده است تا تسمه دندانه دار بتواند ازادانه از آن عبور داده شود. اما در قسمت (22) تسمه دندانه دار از بالا و پایین در بدنه گاری ثابت شده است.
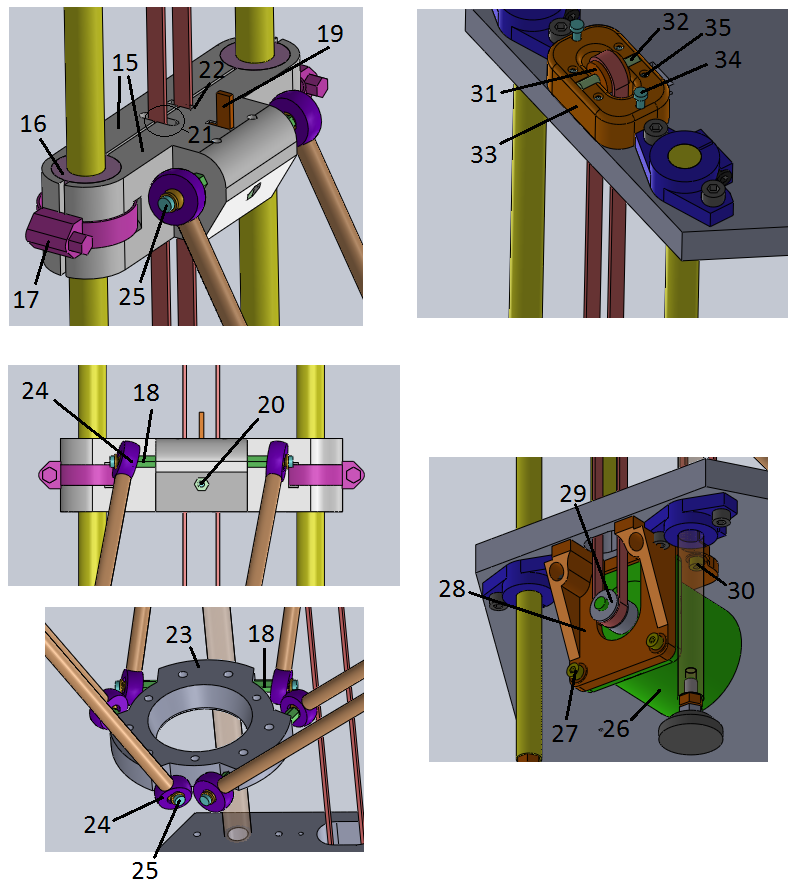
حامل نازل پرینتر سه بعدی (23) دارای یک سوراخ مرکزی مخروطی می باشد. سطح مخروطی این سوراخ با دو قطعه ای که بعدا معرفی می شوند تشکیل یک کلت (collet) را می دهد که برای گرفتن گلویی نازل پرینتر که دارای سطح استوانه است بکار می رود. بر روی حامل نازل سه عدد اسپیسر (18) بطول 60 میلی متر تعبیه شده است که بعنوان بازو برای حامل نازل عملکرده واز این اسپیسرها از رزوه های واقع در انتهای خود و با پیچ های M3 (25) به مفصل های کروی (24) میله های رابط متصل می گردند.
موتورهای پله ای بکار رفته (26) موتورهای پله ای دو فاز با سایز بدنه 57 میلی متری می باشند (Nema23). این موتورها با چهار عدد پیچ M4*15 النی (27) به براکت طراحی شده برای موتورها (28) متصل می گردند.یک عدد پولی 20 دندانه GT2 (29) بر روی محور موتورها نصب شده می شود تا تسمه دندانه دار و به تبع ان حرکت گاری های سه گانه پرینتر سه بعدی کنترل گردد. مجموعه موتور پله ای با دو عدد پیچ الن M4*20 (30) و واشر به صفحه زیرین پرینتر سه بعدی متصل می گردد.
تسمه دندانه دار GT2 از روی یک جفت بلبرینگ (31) به قطر داخل 4 و خارج 13 میلی متر واقع بر روی صفحه بالایی عبور می کند تا یک حلقه ار تسمه شکل گیرد. این امر با نصب بلبرینگ ها بوسیله یک پین (32) به قطر 4 میلی متر و طول 25 میلی متر بر روی قطعه یاتاقانی (33) صورت می گیرد. قطعه یاتاقانی با دو عدد پیچ M4*30 (34) بر روی صفحه بالایی موقعیت دهی می شود. همان طور که در شکل مربوطه مشخص است طول این پیچ ها بزرگتر در نظر گرفته شده استتا قطعه یاتاقانی را موقعیت دهی نمایند بدون اینکه آن را محکم نگهدارند. محکم نگهداشتن قطعه یاتاقانی توسط چهار عدد پیچ تنظیم M3 (35) صورت می گیرد. بدین صورت که با بستن ( محکم کردن) آنها این پیچ ها قطعه یاتاقانی را بر علیه تسمه دندانه دار به سمت بالا حرکت می دهند. این امر به منظور رگلاژ میزان سفتی تسمه در نظر گرفته شده است تا امکان کنترل بر روی میزان سفتی تسمه ها کاملا مهیا باشد.
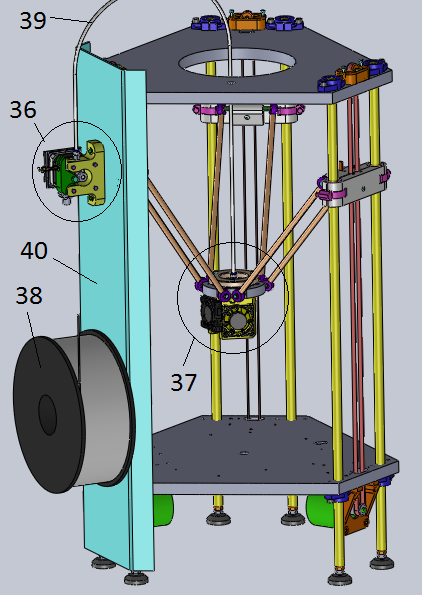
با افزودن دو مجموعه کارکردی مهم به روبات دلتا، مجموعه اجزاء لازم برای پرینتر سه بعدی دلتا کامل می شود. این دو مجموعه عبارتند از اکسترودر فیلامنت (36) و نازل فیلامنت (37). پرینتر سه بعدی دلتا مبتنی بر تکنولوژی " لایه نشانی مذاب" (Fused Deposition Metod یا FDM) می باشد. در این تکنولوژی مواد مصرفی پرینت قطعات به شکل فیلامنت ( نخ، رشته) پلیمری به قطر 1.75 و 2.85 میلی متری بوده و به صورت قرقره فیلامنت (38) به بازار عرضه می شود. این فیلامنت توسط اکسترودر پرینتر سه بعدی به صورت کنترل شده و مطابق با طرح قطعه مورد نظر بواسطه یک شلنگ تفلونی به قطر داخلی 2 و یا 3 میلی متری به سمت نازل پرینتر سه بعدی (37) خورانده می شود. فیلامنت پلیمری به واسطه هیتر تعبیه شده در انتهای نازل به حالت مذاب در امده و سپس از خروجی نازل به صورت یک رشته پلیمری بسته بقطر نازل در اندازه های 0.4،0.3 و یا 0.2 میلی متر اکسترود می شود.با حرکت تولید شده توسط ربات دلتا مطابق طرح قطعه مورد پرینت مذاب اکسترود شده لایه به لایه بر روی میز پرینتر سه بعدی نشانده می شود. در واقع روبات به نحوی نازل را به حرکت در می اورد که ارتفاع نازل (موقعیت Z) از سطح میز ثابت باشد. در این وضعیت نازل را در دو راستای X , Y به حرکت در می اورد. تا طرح یک لایه از قطعه مورد پرینت را بر روی میز پرینتر ایجاد کند. پس از تکمیل پرینت یک لایه از قطعه مورد نظر، نازل پرینتر به اندازه ضخامت یک لایه به سمت بالا جابجا می شود. در این حالت امر پرینت لایه جدید شروع می شود. این روند تا تکمیل پرینت قطعه مورد نظر ادامه می یابد.
اکسترودر پرینتر سه بعدی از اجزای اساسی موتور پله ای سایز Nema 17 (41)، چرخدنده یا چرخ دندانه دار خوراننده فیلامنت (43)، اهرم فشارنده فیلامنت (44)، بلبرینگ فشارنده فیلامنت بر علیه چرخدنده (45)، فنر فشاری (46)، مهره خروسکی تنظیم کننده میزان فشردگی فیلامنت (47)، فیتینگ پنوماتیکی جهت اتصال شلنگ تفلونی (48) تشکیل شده است.
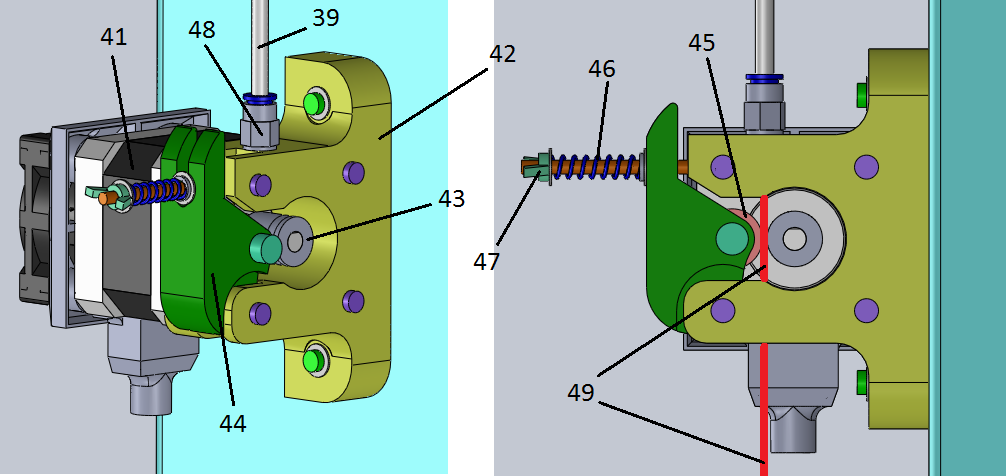
فیلامنت پلیمری پرینتر سه بعدی (49) از سوراخ تعبیه شده در پایین بدنه اکسترودر (42) باید به فضای مابین چرخ دنده خوراننده (43) و بلبرینگ فشارنده (45) وارد شده و از انجا از سوراخ واقع در سمت بالای بدنه اکسترودر وارد فیتینگ پنوماتیکی (48) سپس شیلنگ تفلون (39) هدایت شود. فیلامنت طول کل شلنگ تفلونی را طی نماید. در این مرحله به شرطی که هیتر نازل پرینتر روشن باشد، موتور پله ای اکسترودر می تواندفیلامنت مذاب را از نازل آن اکسترود نماید. با سفت کردن مهره خروسکی (47) و به تیع آن افزایش فشردگی فنر (46) می توان میزان نیروی گیرایی وارد بر فیلامنت را تنظیم کرد.
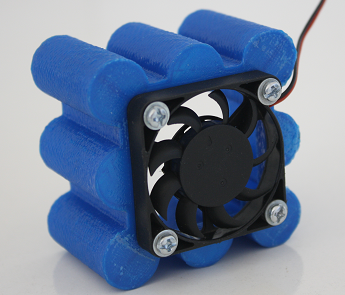
نازل پرینتر سه بعدی از اجزاء اساسی نوک نازل (56)، بلوک حرارتی (53)، هیتر الکتریکی (54)، سنسور دما ( ترمیستور) (55)، پیچ سوراخ دار واسط (52)،قطعه آلومینیومی خنک کننده (51)، حامل فن خنک کننده (58)، فن خنک کننده قطعه آلومینیومی (59) و فن های کمک کننده برای سرد شدن قطعه هنگام پرینت (57) می باشند.
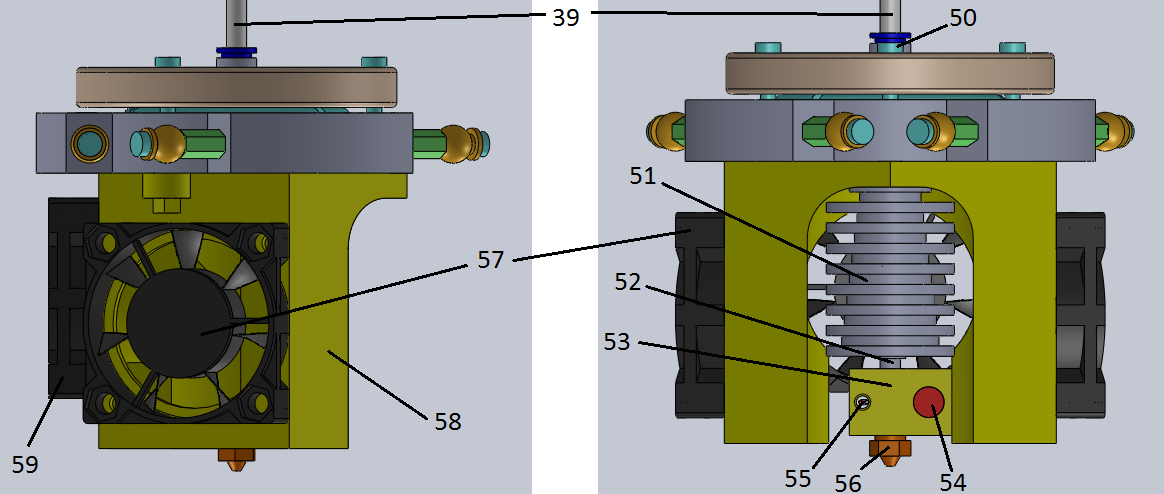
فیلامنت پلیمری خورانده شده توسط اکسترودر از طریق شلنگ تفلونی (39) و بواسطه فیتینگ پنوماتیکی نازل (50) وارد سوراخ قطعه خنک کننده آلومینیومی (51) می شود. فیلامنت کل مسیر قطعه خنک کننده آلومینیومی و پیچ سوراخ دار واسط (52) را تا رسیدن نوک نازل (56) را طی می کند. از لحظه رسیدن فیلامنت به منزقه ای که توسط بلوک حرارتی (53) و بواسطه حرارت تولیدی هیتر الکتریکی (54) گرم می شود شروع به ذوب شدن می نمایید. به نحوی که می تواند از روزنه نوک نازل به راحتی به بیرون اکسترود شود. میزان دمای بلوک حرارتی به واسطه سنسود حرارتی (55) تعبیه شده در بلوک حرارتی و توسط سیستم کنترلی پرینتر در دمای تنظیم شده جهت پرینت قطعه مورد نظر کنترل می شود.مقداری از حرارت تولید شده توسط هیتر بواسطه پیچ سوراخ دار به سمت بالا انتقال می یابد. این انتقال حرارت می تواند موجب انسداد مسیر خوراندن فیلامنت گردد. قطعه الومینیومی خنک کننده این حرارت انتقال یافته را به سمت پره های خود هدایت می کند و فن خنک کننده (59) بطور کامل این حرارت را دفع می نماید.در مواقعی که فیلامنت پلیمری پرینت شونده از نوع فیلامنتی مثل PLA می باشد که پس از اکسترود شدن بلافاصله منجمد نمی شود نیاز به خنک کاری قطعه تحت پرینت می باشد. بدین منظور فن های خنک کاری قطعه (57) هوای محیط را داخل قطعه (58) دمیده شده و سپس این هوا از منفذهای تعبیه شده بر کف این قطعه بر قطعه تحت پرینت دمیده و آن را خنک کرده و به انجماد سریع ان کمک می کند.
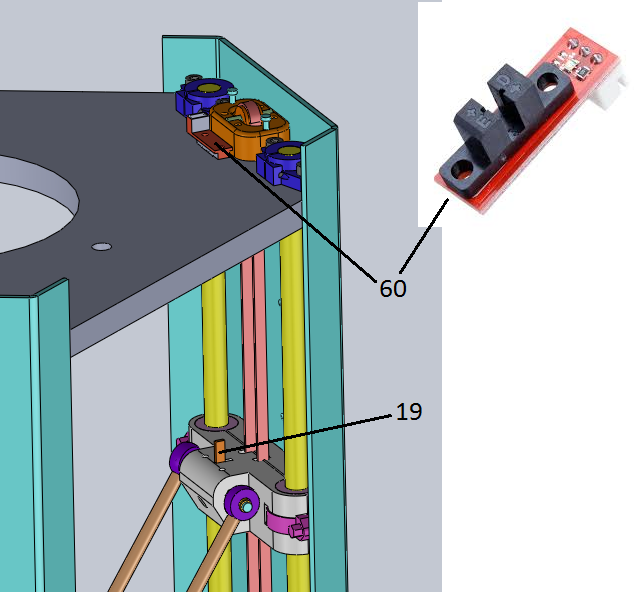
قبل از اینکه قسمت های الکتریکی، الکترونیکی و کنترلی پرینتر سه بعدی دلتا تبیین شوند دو جزء دیگر از اجزای لازم برای عملکرد پرینتر سه بعدی می باشد بیان می گردد. برای اینکه بتوانیم برای یک پرینتر سه بعدی مختصات هندسی را تعریف کنیم نیاز به نقطه صفر و رفرنس بر روی هر یک از محورهای سه گانه ان داریم. در این پرینتر سه بعدی، نقطه صفر و رفرنس با تعبیه نمودن یک سنسور موقعیت نوری (60) در بالاترین نقطه هر یک از محورهای سه گانه تعریف می گردد. در اغاز عملکرد پرینتر سه بعدی یکی از اولین کارهایی که پرینتر باید انجام دهد، حرکت به سمت موقعیت رفرنس و صفر خود می باشد. لذا هر یک از گاری های پرینتر سه بعدی برای مستقر شدن در نقطعه صفر و رفرنس ( بطور همزمان) به سمت بالا حرکت می کنند. وقتی قطعه شاتر سنسور نوری (19) وارد شیار سنسور نوری می شود، خط نوری ارسالی از یک قطعه سنسور به قطب مقابل را قطع می کند. این امر برای پرینتر سه بعدی رسیدن به نقطعه صفر و رفرنس معنی می شود و لذا گاری پرینتر از حرکت بیشتر باز ایستاده ودر این نقطعه مستقر می گردد.
جزء دیگر از اجزای لازم برای عملکرد بهینه و یونیورسال کردن پرینتر سه بعدی،مجهز کردن ان به صفحه داغ یا بستر گرم (61) می باشد. با توجه به طراحی فرمی حاکم بر پرینتر سه بعدی دلتا یک صفحه داغ دایره ای با سطح پرینت به بزرگی 200 میلی متر در نظر گرفته شده است.صفحه داغ در واقع یک المنت حرارتی الکتریکی مبتنی بر مدار چاپی (PCB) می باشد. یک جفت سیم برق ولتاژ 12 یا 24 ولت را برای آن تامین می کنند. این امر می تواند به افزایش دمای صفحه داغ تا اندازه 120 درجه سانتیگراد منجر گردد.یک عدد سنسور حرارتی انالوگ- از نوع ترمیسور- در مرکز این صفحه داغ تعبیه می شود و بدین وسیله امکان کنترل دمای صفحه داغ فراهم می شود.
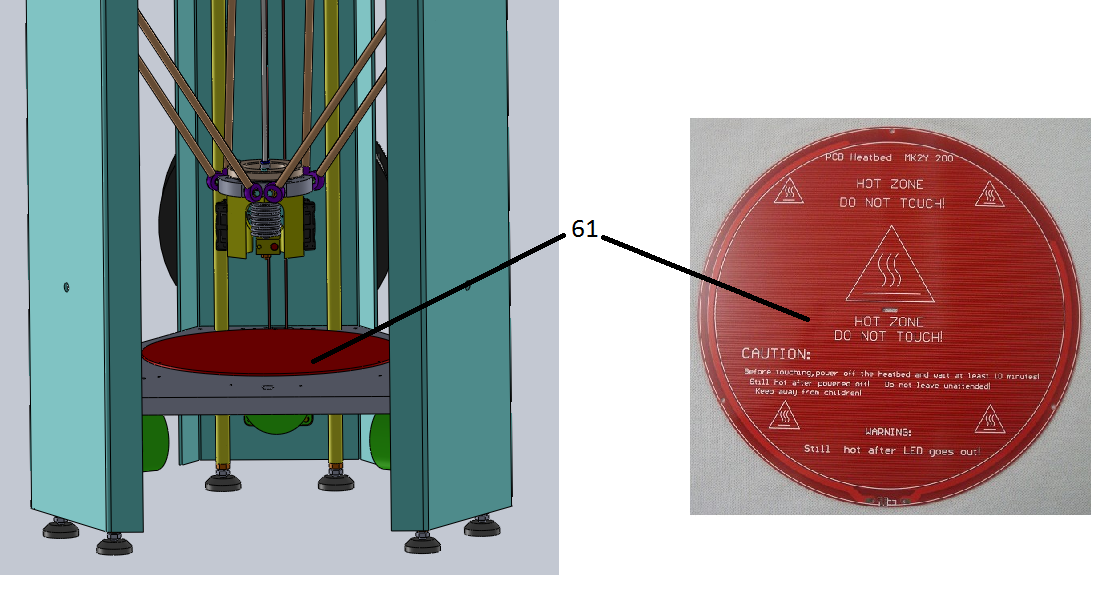
وقتی که پرینتر سه بعدی کار پرینت لایه های اولیه را انجام داده و در حال پرینت لایه های بالایی است، لایه های اولیه شروع به سرد شدن و انقباض می کنند. در موقع پرینت با تعدادی از فیلامنت های پلیمری از جمله ABS این امر به معنای تاب برداشتن قطعه در لایه های پایینی و بلند شدن قطعه در گوشه ها می باشد که امر پرینت سه بعدی را دچار مشکل کرده و قطعه پرینت شده را از دقت ابعادی و فرمی می اندازد. مخهز کردن پرینتر سه بعدی دلتا به صفحه داغ بطور قابل توجهی از این مشکل پیشگیری می کند.
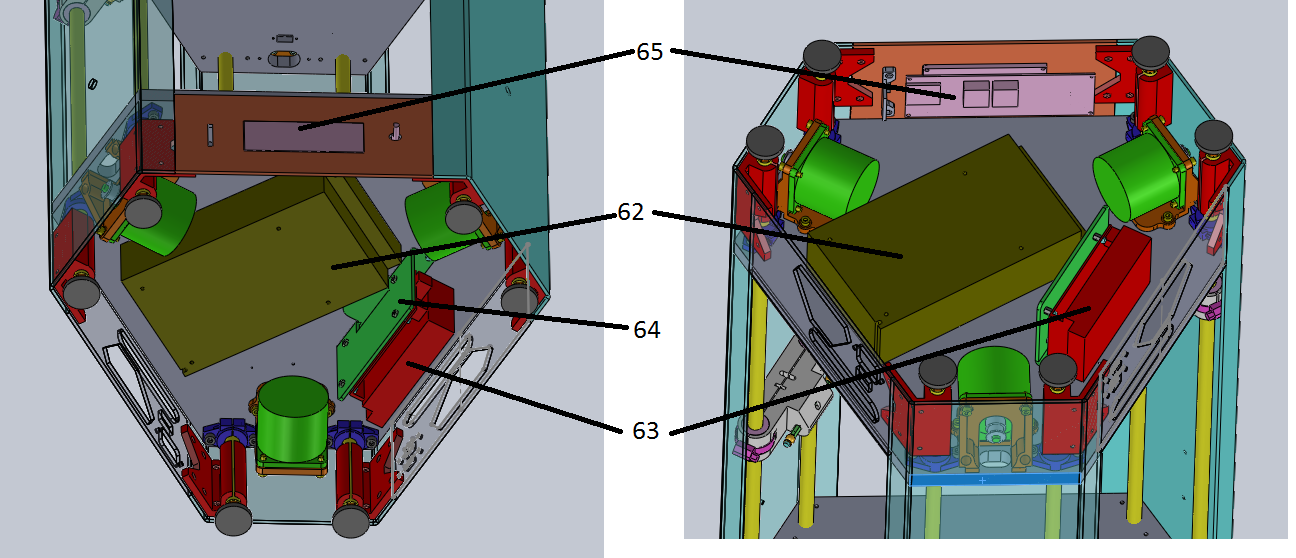
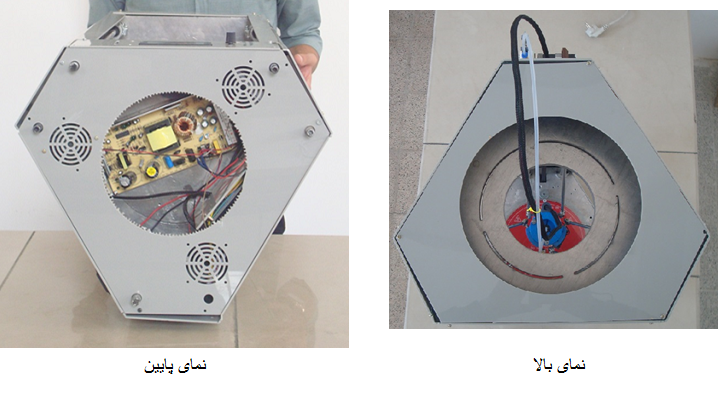
اجزاء الکتریکی، الکترونیکی و کنترلی پرینتر سه بعدی دلتا در فضای زیر صفحه پایینی شاسی پرینتر تعبیه می شود. این اجزا عبارتند از منبع تغذیه 12 ولی 20 امپر (62)، مجم.عه مدار الکترونیکی (63)، ماژول LCD و کارت حافظه و انتخابگر دستورات (65) می باشد.
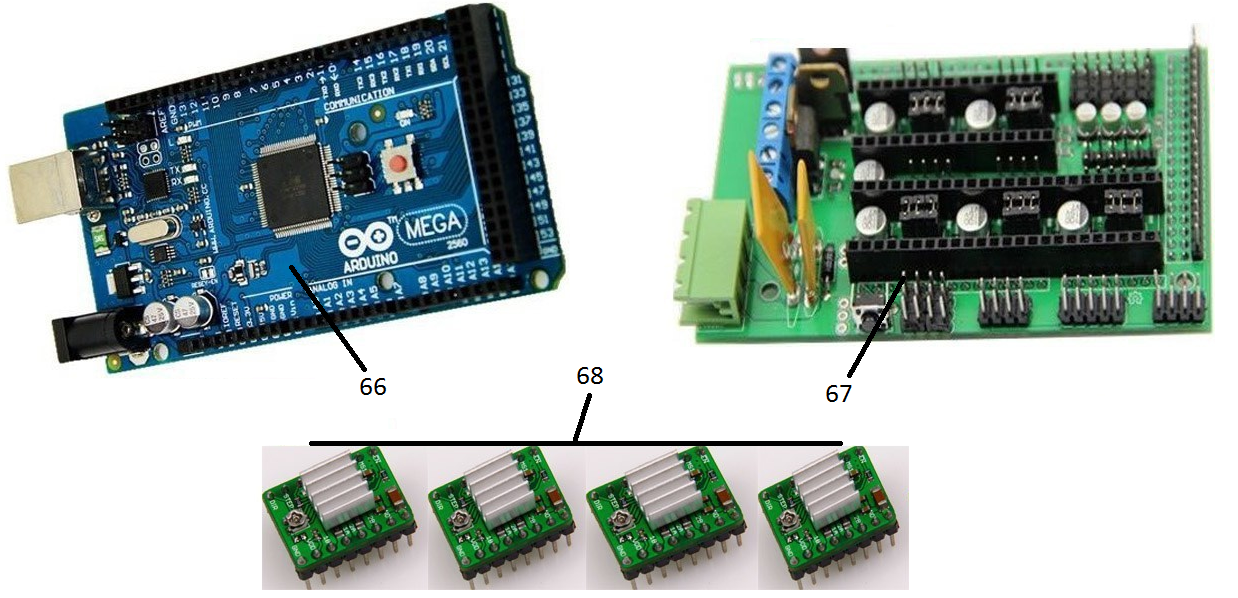
مجموعه مدارات الکترونیک (63) شامل یک برد اردئنوی مگا 2560 (66)، یک برد RAMPS 1.4 ( واسط میکرو کنترلر با منبع تغذیه) (67) و 4 عدد درایور موتور پله ای پولول(POLOLU) (68) می باشد.
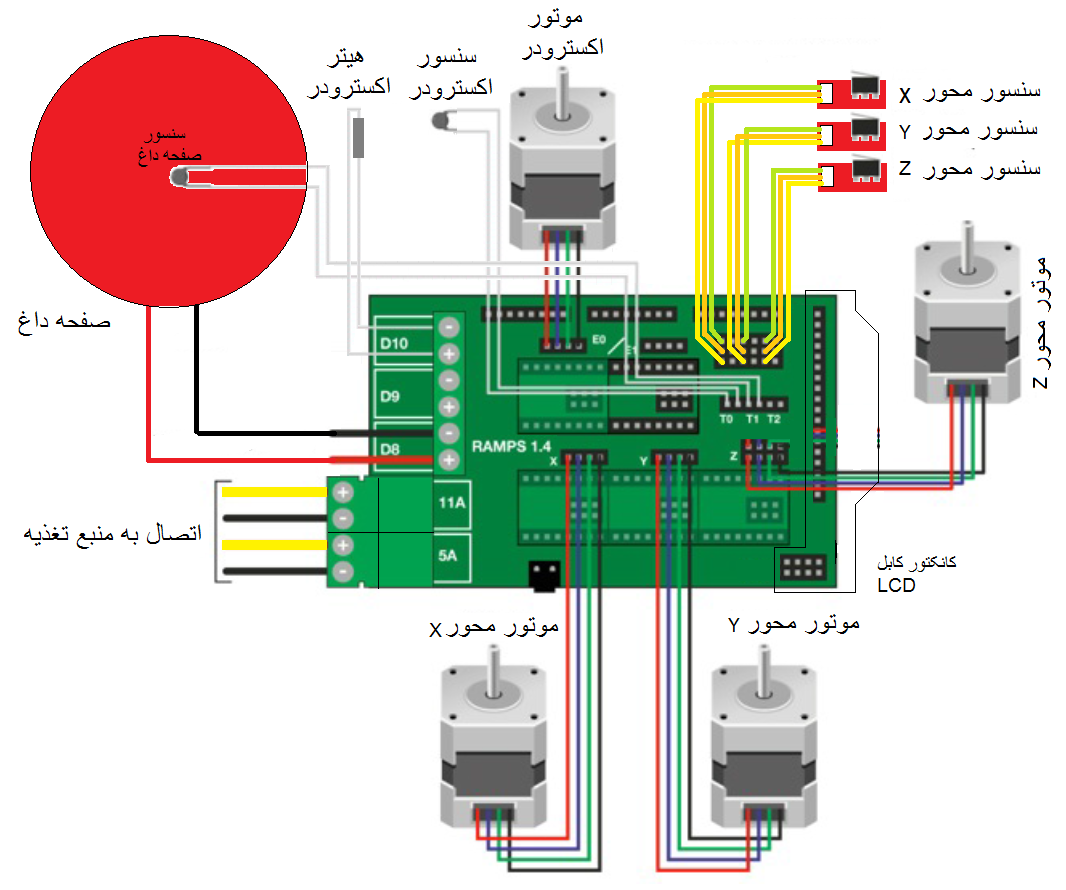
بورد RAMPS 1.4 یک مدار اختصاصی ماژولدار می باشد که به منظور سوار شدن بر روی بورد اردئینوی مگا می باشد. درایورهای استپر موتور پولولو نیز برای سوار شدن بر روی پین- هدرهای موجود بر روی بورد RAMPS 1.4 طراحی و ساخته شده است. بدین وسیله مجم.عه مدارات الکترونیکی (63) مورد استفاده در ساخت پرینتر سه بعدی بصورت یکپارچه و متمرکز در می آید. نحوه سیم کشی و اتصالات از مجموعه الکترونیکی (63) به دیگر اجزاء پرینتر سه بعدی در شکل زیر آمده است.
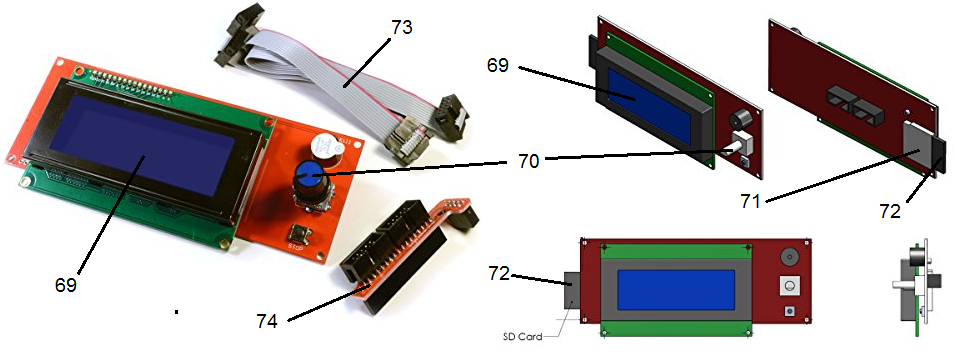
ماژول LCD و کارت حافظه و انتخابگر دستورات (65) یک ماژول اماده بوده و چندین عملکرد مهم را بر عهده دارد. LCD این مجموعه (69) وظیفه نمایش منوی دستورات و امکان ایجاد تعامل گرافیکی کاربر با پرینتر سه بعدی را تامین می کند. با کلیک بر روی ولوم انکدر (70) منوی دستورات ظاهر می شود. در این موقع با چرخاندن ولوم بصورت ساعتگرد و پادساعتگرد می توان بر روی دستورات منو به سمت بالا و یا پایین جابجا می شود. و وقتی دوباره ولوم را کلیک کنیم دستورات- لایت شده اجرا خواهند شد. برای اینکه یک قطعه را با پرینتر سه بعدی پرینت نماییم ابتدا باید ان را به صورت سه بعدی در محیط کامپیوتری مدل سازی نماییم. سپس این مدل سه بعدی بصورت فایلی با پسوند stl ذخیره می شود. چنین فایلی را می توان در محیط های نرم افزاری مخصوص پرینترهای سه بعدی نظیر نرم افزار Cura باز نمود. مدل باز شده در این نرم افزارها را باید به صورت یک فایل متنی GCODE (زبان دستوری دستگاههای CNC) ذخیره کرد. حال می توان این فایل متنی را بر روی کارت حافظه SD (72) کژی نمود و با جایگذاری آن در SD Card خوان (71) تعبیه شده در این ماژول، قطعه مورد نظر را ( بدون نیاز به داشتن اتصال با کامپیوتر) پرینت کرد. این ماژول با دو عدد کابل 10 رشته ای (73) و کانکتور مخصوص خود (74) به" کانکتور کابل LCD" موجود بر روی RAMPS متصل می گردد.
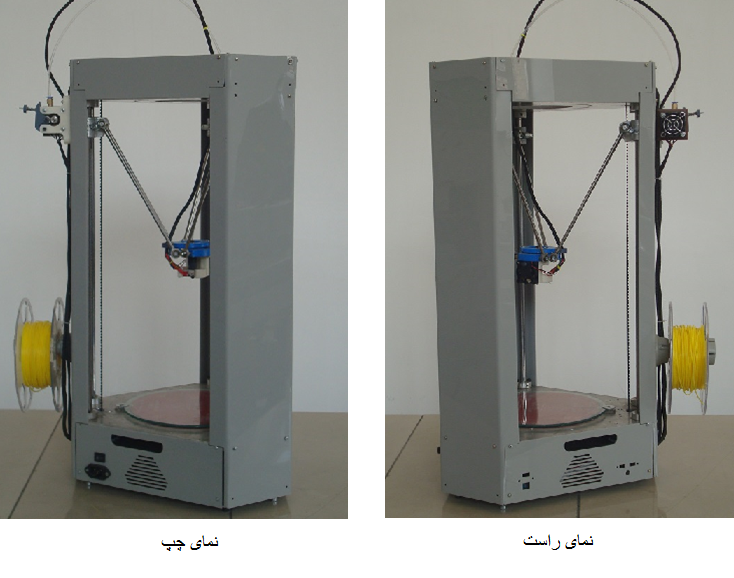
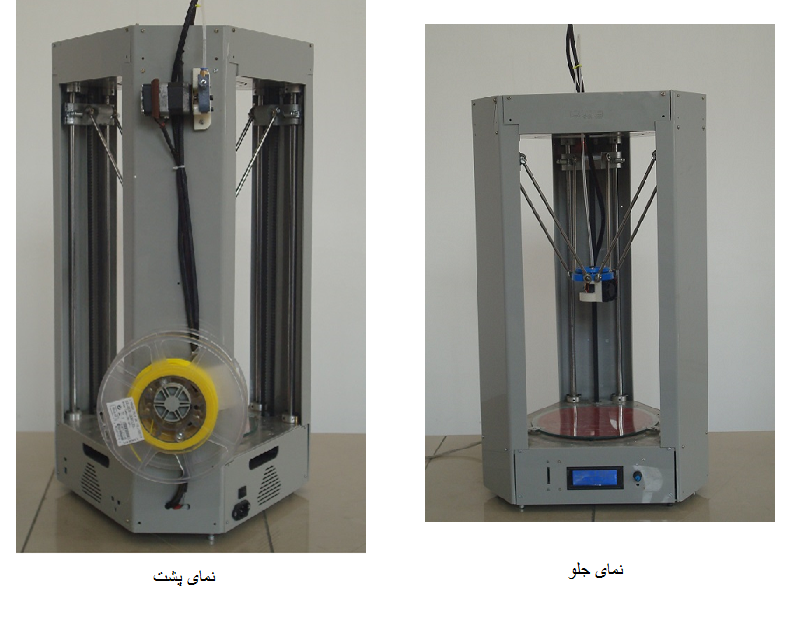
در نهایت امر با سوار کردن بدنه طراحی شده از پلکسی از پلکسی گلاس بر روی پرینتر سه بعدی دلتا،این پرینتر - با اندکی تفاوت در جزئیات- بصورت محصولی به شکل زیر می رسد:
تصویر قطعات نمونه ساخته شده با پرینتر سه بعدی دلتا
تعدادی از قطعات صنعتی، هنری و اسباب بازی که با استفاده از این پرینتر سه بعدی دلتا پرینت شده اند در اشکال زیر امده است:


سازه پرینتر سه بعدی دلتای طراحی شده از صلبیت بالایی برخوردار می باشد تا توان مقاومت در برابر نیرو های دینامیکی و ارتعاشات ایجاد شده در حین عملکرد را داشته باشد. این ویژگی، پرینتر سه بعدی ابداعی را به یک پرینتر سه بعدی کلاس صنعتی تبدیل کرده است.
بالا